def compute_cost_reg(AL, y, parameters, lambd=0):
"""
Computes the Cross-Entropy cost function with L2 regularization.
Arguments
---------
AL : 2d-array
probability vector of shape 1 x training_examples.
y : 2d-array
true "label" vector.
parameters : dict
contains all the weight matrices and bias vectors for all layers.
lambd : float
regularization hyperparameter.
Returns
-------
cost : float
binary cross-entropy cost.
"""
# number of examples
m = y.shape[1]
# compute traditional cross entropy cost
cross_entropy_cost = compute_cost(AL, y)
# convert parameters dictionary to vector
parameters_vector = dictionary_to_vector(parameters)
# compute the regularization penalty
L2_regularization_penalty = (lambd / (2 * m)) * np.sum(np.square(parameters_vector))
# compute the total cost
cost = cross_entropy_cost + L2_regularization_penalty
return cost
def linear_backword_reg(dZ, cache, lambd=0):
"""
Computes the gradient of the output w.r.t weight, bias, & post-activation
output of (l - 1) layers at layer l.
Arguments
---------
dZ : 2d-array
gradient of the cost w.r.t. the linear output (of current layer l).
cache : tuple
values of (A_prev, W, b) coming from the forward propagation in the
current layer.
lambd : float
regularization hyperparameter.
Returns
-------
dA_prev : 2d-array
gradient of the cost w.r.t. the activation (of the previous layer l-1).
dW : 2d-array
gradient of the cost w.r.t. W (current layer l).
db : 2d-array
gradient of the cost w.r.t. b (current layer l).
"""
A_prev, W, b = cache
m = A_prev.shape[1]
dW = (1 / m) * np.dot(dZ, A_prev.T) + (lambd / m) * W
db = (1 / m) * np.sum(dZ, axis=1, keepdims=True)
dA_prev = np.dot(W.T, dZ)
assert dA_prev.shape == A_prev.shape
assert dW.shape == W.shape
assert db.shape == b.shape
return dA_prev, dW, db
def linear_activation_backward_reg(dA, cache, activation_fn="relu", lambd=0):
"""
Arguments
---------
dA : 2d-array
post-activation gradient for current layer l.
cache : tuple
values of (linear_cache, activation_cache).
activation : str
activation used in this layer: "sigmoid", "tanh", or "relu".
lambd : float
regularization hyperparameter.
Returns
-------
dA_prev : 2d-array
gradient of the cost w.r.t. the activation (of previous layer l-1),
same shape as A_prev.
dW : 2d-array
gradient of the cost w.r.t. W (current layer l), same shape as W.
db : 2d-array
gradient of the cost w.r.t. b (current layer l), same shape as b.
"""
linear_cache, activation_cache = cache
if activation_fn == "sigmoid":
dZ = sigmoid_gradient(dA, activation_cache)
dA_prev, dW, db = linear_backword_reg(dZ, linear_cache, lambd)
elif activation_fn == "tanh":
dZ = tanh_gradient(dA, activation_cache)
dA_prev, dW, db = linear_backword_reg(dZ, linear_cache, lambd)
elif activation_fn == "relu":
dZ = relu_gradient(dA, activation_cache)
dA_prev, dW, db = linear_backword_reg(dZ, linear_cache, lambd)
return dA_prev, dW, db
def L_model_backward_reg(AL, y, caches, hidden_layers_activation_fn="relu", lambd=0):
"""
Computes the gradient of output layer w.r.t weights, biases, etc. starting
on the output layer in reverse topological order.
Arguments
---------
AL : 2d-array
probability vector, output of the forward propagation
(L_model_forward()).
y : 2d-array
true "label" vector (containing 0 if non-cat, 1 if cat).
caches : list
list of caches for all layers.
hidden_layers_activation_fn :
activation function used on hidden layers: "tanh", "relu".
lambd : float
regularization hyperparameter.
Returns
-------
grads : dict
gradients.
"""
y = y.reshape(AL.shape)
L = len(caches)
grads = {}
dAL = np.divide(AL - y, np.multiply(AL, 1 - AL))
(
grads["dA" + str(L - 1)],
grads["dW" + str(L)],
grads["db" + str(L)],
) = linear_activation_backward_reg(dAL, caches[L - 1], "sigmoid", lambd)
for l in range(L - 1, 0, -1):
current_cache = caches[l - 1]
(
grads["dA" + str(l - 1)],
grads["dW" + str(l)],
grads["db" + str(l)],
) = linear_activation_backward_reg(
grads["dA" + str(l)], current_cache, hidden_layers_activation_fn, lambd
)
return grads
def model_with_regularization(
X,
y,
layers_dims,
learning_rate=0.01,
num_epochs=3000,
print_cost=False,
hidden_layers_activation_fn="relu",
lambd=0,
):
"""
Implements L-Layer neural network.
Arguments
---------
X : 2d-array
data, shape: number of examples x num_px * num_px * 3.
y : 2d-array
true "label" vector, shape: 1 x number of examples.
layers_dims : list
input size and size of each layer, length: number of layers + 1.
learning_rate : float
learning rate of the gradient descent update rule.
num_epochs : int
number of times to over the training data.
print_cost : bool
if True, it prints the cost every 100 steps.
hidden_layers_activation_fn : str
activation function to be used on hidden layers: "tanh", "relu".
lambd : float
regularization hyperparameter.
Returns
-------
parameters : dict
parameters learnt by the model. They can then be used to predict test
examples.
"""
# get number of examples
m = X.shape[1]
# to get consistents output
np.random.seed(1)
# initialize parameters
parameters = initialize_parameters(layers_dims)
# intialize cost list
cost_list = []
# implement gradient descent
for i in range(num_epochs):
# compute forward propagation
AL, caches = L_model_forward(X, parameters, hidden_layers_activation_fn)
# compute regularized cost
reg_cost = compute_cost_reg(AL, y, parameters, lambd)
# compute gradients
grads = L_model_backward_reg(AL, y, caches, hidden_layers_activation_fn, lambd)
# update parameters
parameters = update_parameters(parameters, grads, learning_rate)
# print cost
if (i + 1) % 100 == 0 and print_cost:
print("The cost after {} iterations: {}".format((i + 1), reg_cost))
# append cost
if i % 100 == 0:
cost_list.append(reg_cost)
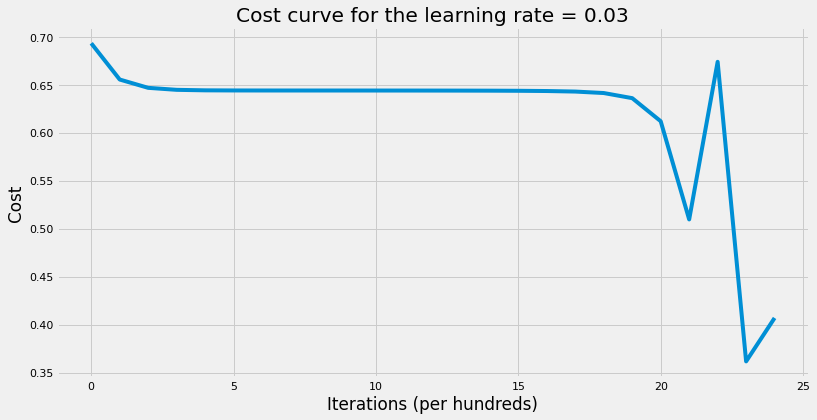
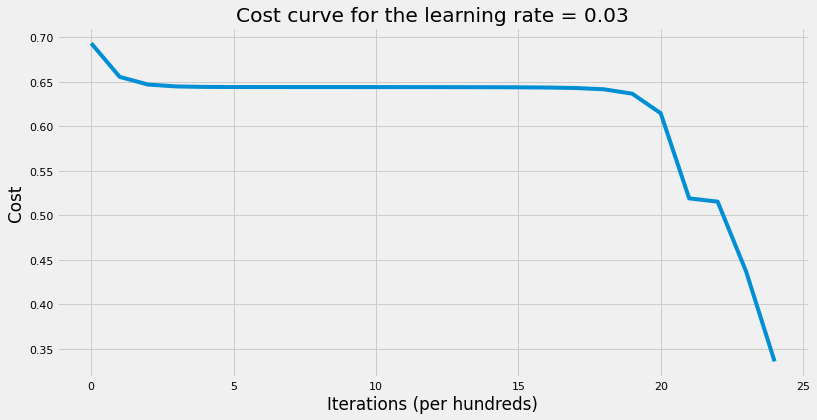
# plot the cost curve
plt.plot(cost_list)
plt.xlabel("Iterations (per hundreds)")
plt.ylabel("Cost")
plt.title("Cost curve for the learning rate = {}".format(learning_rate))
return parameters